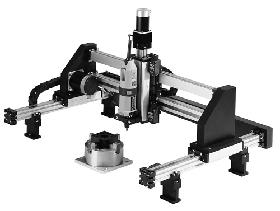
装配机器人是柔性自动化装配系统的核心设备,由机器人操作机、控制器、末端执行器和传感系统组成。其中操作机的结构类型有水平关节型、直角坐标型、多关节型和圆柱坐标型等;控制器一般采用多CPU或多级计算机系统,实现运动控制和运动编程;末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感系统又来获取装配机器人与环境和装配对象之间相互作用的信息。
粤公网安备 44030502002758号