
热门关键词:
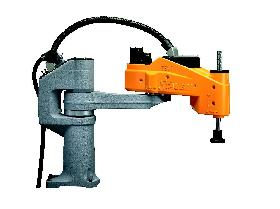
SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z),如图所示。这类机器人的结构轻便、响应快,例如Adept1型SCARA机器人运动速度可达10m/s,比一般关节式机器人快数倍。它最适用于平面定位,垂直方向进行装配的作业。
1978年,日本山梨大学牧野洋发明SCARA,该机器人具有四个轴和四个运动自由度,(包括沿X,Y,Z方向的平移和绕Z轴的旋转自由度)。
SCARA系统在x,y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作,例如将一个圆头针插入一个圆孔,故SCARA系统首先大量用于装配印刷电路板和电子零部件;SCARA的另一个特点是其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件,如集成电路板等。
如今SCARA机器人还广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。它的第一个轴和第二个轴具有转动特性,第三和第四个轴可以根据工作的需要的不同,制造成相应多种不同的形态,并且一个具有转动、另一个具有线性移动的特性。由于其具有特定的形状,决定了其工作范围类似于一个扇形区域。
SCARA机器人可以被制造成各种大小,最常见的工作半径在100毫米至1000毫米之间,此类的SCARA机器人的净载重量在1千克至200千克之间。

