
闭环控制是根据控制对象输出反馈来进行校正的控制方式,它是在测量出实际与计划发生偏差时,按定额或标准来进行纠正的。闭环控制,从输出量变化取出控制信号作为比较量反馈给输入端控制输入量,一般这个取出量和输入量相位相反,所以叫负反馈控制,自动控制通常是闭环控制。比如家用空调温度的控制。
在控制论中,闭环通常指输出端通过“旁链”方式回馈到输入,所谓闭环控制。输出端回馈到输入端并参与对输出端再控制,这才是闭环控制的目的,这种目的是通过反馈来实现的。正反馈和负反馈是闭环控制常见的两种基本形式。其中负反馈和正反馈从达于目的的角度讲具有相同的意义。从反馈实现的具体方式来看,正反馈和负反馈属于代数或者算术意义上的“加减”反馈方式,即输出量回馈到输入端后,与输入量进行加减的统一性整合后,作为新的控制输出,去进一步控制输出量。实际上,输出量对输入量的回馈远不止这些方式。这表现为:运算上,不止于加减运算,还包括更广域的数学运算;回馈方式上,输出量对输入量的回馈,也不一定采取与输入量进行综合运算形成统一的控制输出,输出量可以通过控制链直接施控于输入量等等。
当受控客体受干扰的影响,其实现状态与期望状态出现偏差时,控制主体将根据这种偏差发出新的指令,以纠正偏差,抵消干扰的作用。在闭环控制中,由于控制主体能根据反馈信息发现和纠正受控客体运行的偏差,所以有较强的抗干扰能力,能进行有效的控制,从而保证预定目标的实现。管理中所实行的控制大多是闭环控制,所用的控制原理主要是反馈原理。
其反馈回路的流程如下图所示: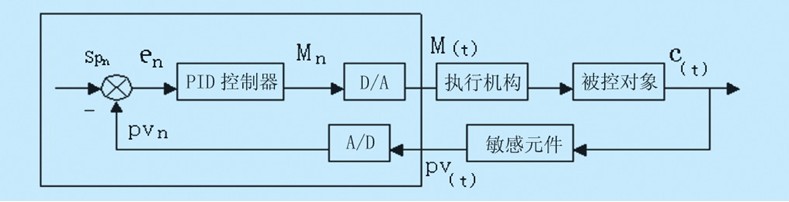
比如上面举的汽车发动机燃烧控制:
发动机电喷系统的闭环控制是一个实时的氧传感器、计算机和燃油量控制装置三者之间闭合的三角关系。氧传感器“告诉”计算机混合气的空燃比情况,计算机发出命令给燃油量控制装置,向理论值的方向 调整空燃比(14.7:1)。这一调整经常会超过一点理论值,氧传感器察觉出来,并报告计算机,计算机再发出命令 调回到14.7:1。因为每一个调整的循环都很快,所以空燃比不会偏离14.7:1,一旦运行,这种闭环调整就连续不断。采用闭环控制的电喷发动机,由于能使发动机始终在较理想的工况下运行(空燃比偏离理论值不会太多),从而能保证汽车不仅具有较好的动力性能,还能省油。
闭环控制在各种控制实例中有具体的表现方式:
正反馈和负反馈是闭环控制常见的两种基本形式。其中负反馈和正反馈从达于目的的角度讲具有相同的意义。从反馈实现的具体方式来看,正反馈和负反馈属于代数或者算术意义上的“加减”反馈方式,即输出量回馈到输入端后,与输入量进行加减的统一性整合后,作为新的控制输出,去进一步控制输出量。实际上,输出量对输入量的回馈远不止这些方式。这表现为:运算上,不止于加减运算,还包括更广域的数学运算;回馈方式上,输出量对输入量的回馈,也不一定采取与输入量进行综合运算形成统一的控制输出,输出量可以通过控制链直接施控于输入量等等
在闭环控制系统里,即使有干扰,也能通过自己的调节保持原来的状态。实施闭环控制的抗干扰能力来自于反馈作用。因为在组织形式上增设了一个反馈机构,能把造成偏离目标的原因以及一贯干扰的因素及时地反馈给控制者,使决策控制层作出正确的决策,随时修正目标。
闭环控制的优点是充分发挥了反馈的重要作用,排除了难以预料或不确定的因素,使校正行动更准确,更有力。但它缺乏开环控制的那种预防性。如在控制过程中造成不利的后果才采取纠正措施。
开环控制没有反馈环节,系统的稳定性不高,响应时间相对来说很长,精确度不高,使用于对系统稳定性精确度要求不高的简单的系统.
开环控制是指控制装置与被控对象之间只有按顺序工作,没有反向联系的控制过程,按这种方式组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的控制作用发生影响,没有自动修正或补偿的能力。
闭环控制有反馈环节,通过反馈系统使系统的精确度提高,响应时间缩短,适合于对系统的响应时间,稳定性要求高的系统.
半闭环控制系统是在开环控制系统的伺服机构中装有角位移检测装置,通过检测伺服机构的滚珠丝杠转角间接检测移动部件的位移,然后反馈到数控装置的比较器中,与输入原指令位移值进行比较,用比较后的差值进行控制,使移动部件补充位移,直到差值消除为止的控制系统。这种伺服机构所能达到的精度、速度和动态特性优于开环伺服机构,为大多数中小型数控机床所采用。

